Ashwin Sira, Junior Electrical Engineer, StarFish Medical03.01.17
Many medical devices use magnets in various forms. From the small electromagnets that assist with extracting foreign objects, to the large superconducting magnets in MRI machines, magnets play a diverse and critical set of roles.
Motors and other electromagnets are capable of moving very accurately and with great force; however, they generally come with the penalty of high power consumption. As we push for smaller, lower power medical devices, permanent magnets can provide good low-power holding solutions. With recent advances, there is a strong push to incorporate more robotics into the medical device field.
Here I will be discussing two solutions which I worked with as part of a team building autonomous submersibles for the AUVSI RoboSub competition. One of the challenges involves dropping a metal ball into a box.
Sealing things so they function reliably underwater is a challenge when operating on a budget, and in the quest to minimize dynamic mechanical seals several different options were considered. Mechanical solutions such as a geneva drive based release mechanism only required a single seal, however two purely electromagnetic solutions made the final round.
The Halbach Array
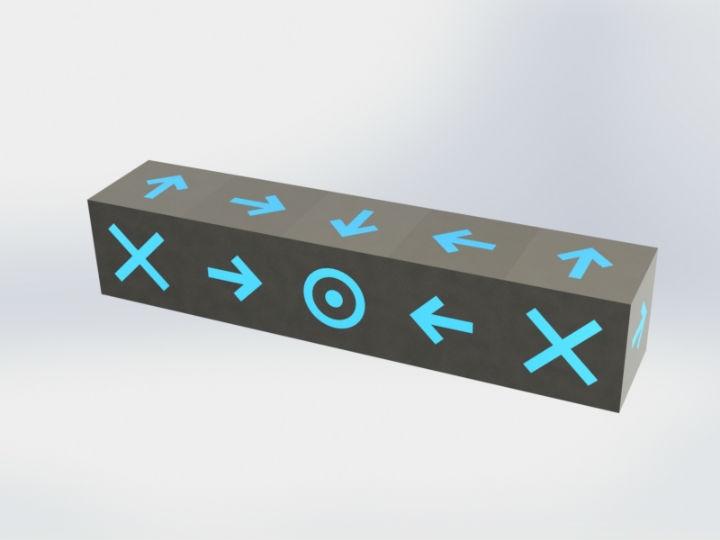
The Halbach array is an arrangement of permanent magnets such that the field is only present on one side of the array. The Halbach Array came out ahead early on as repeatable and easy to build. The magnetic array would be connected to the end of a servo, and be fully encased in a plastic housing along with the motor and control hardware. To release the ball, the array would be rotated to direct the magnetic field away from the ball, which would then drop out of the robot into the target box. In prototype testing this arrangement worked fairly reliably. The rendering below shows roughly the setup we were going for.
It was cheap, relatively easy to build, and could be actuated with off-the-shelf low power hobby servos and a very simple interface to the main computer. The solution is completely sealed—requiring no dynamic watertight seals in order to function.
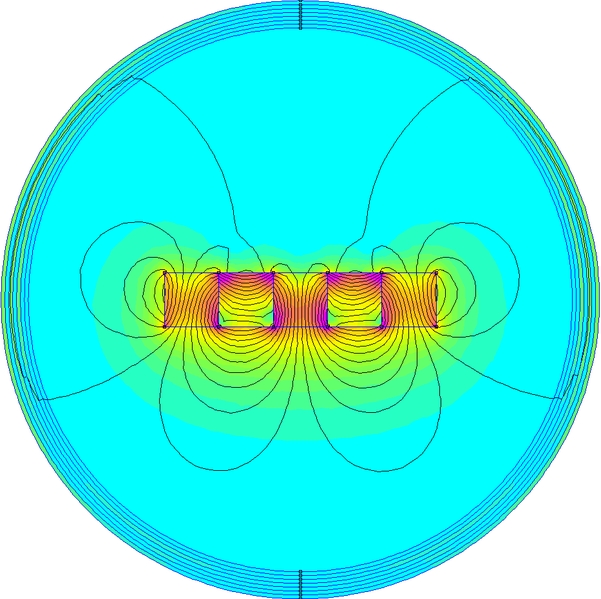
This image shows how the array functions. Magnetic flux, which would normally come out the back side of the array, instead travels laterally to a magnet that directs the field back out the front face of the array. This image was generated using Finite Element Method Magnetics (FEMM), an open source magnetics package.
The resulting field on the front side of the array is much stronger than the field on the other side of the array. It's also possible to create a functional array using just 3 magnets.

Several arrays can be combined to create magnetic couplings for transmitting rotation through sealed surfaces. There are drawbacks to this approach. Due to their orientations, the magnets are constantly repelling each other, making both construction and guaranteeing that the assembly stays together challenging. Size can also be a consideration. When designing thrusters for the submersible I considered a magnetic coupling to avoid having to seal the propeller shaft, however such a coupling was far too large for our application.
If you can manage those challenges, the Halbach Array can provide an extremely strong holding force for gripping tools or other load bearing needs.
The Normally On Magnetic Latch
The Halbach Array eliminated mechanical seals, but still required moving parts. The normally on magnetic latch ultimately came out as the best option due to it being completely solid state. A permanent magnet of low coercivity (such as the Neodymium cube magnet shown at the top of this blog) is placed on top of a ferromagnetic material, which in this case was low carbon steel. A coil of magnet wire is then wrapped around the steel core, creating a solenoid.
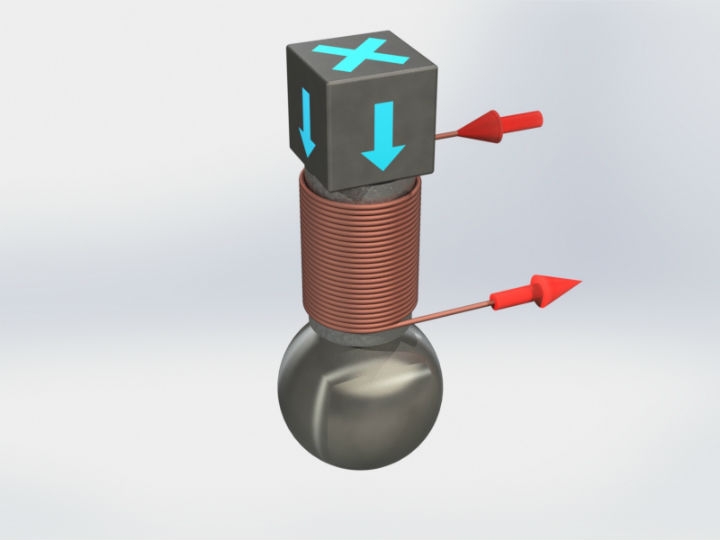
A normally on magnetic latch.
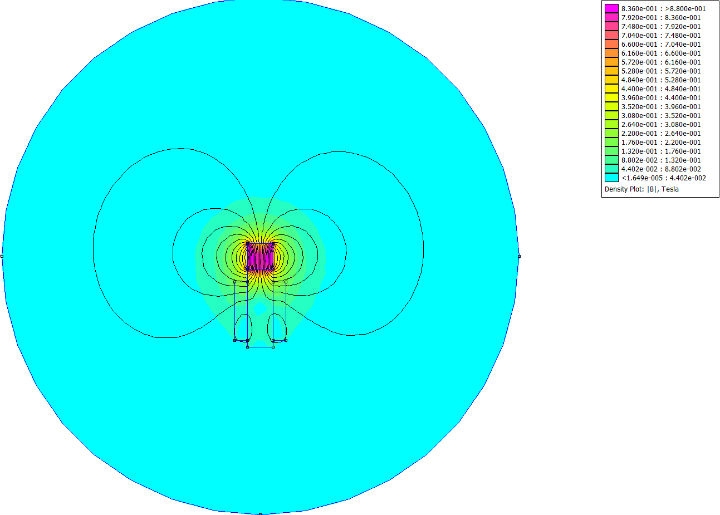
The above rendering has far fewer than the required number of wraps, and is just for illustration purposes. In general, it is more desirable to use more turns, which requires more voltage, but less current. The image below shows the magnetic field lines in the off condition, where the permanent magnet's field is carried through the high susceptibility steel. The coil has no current flowing through it.
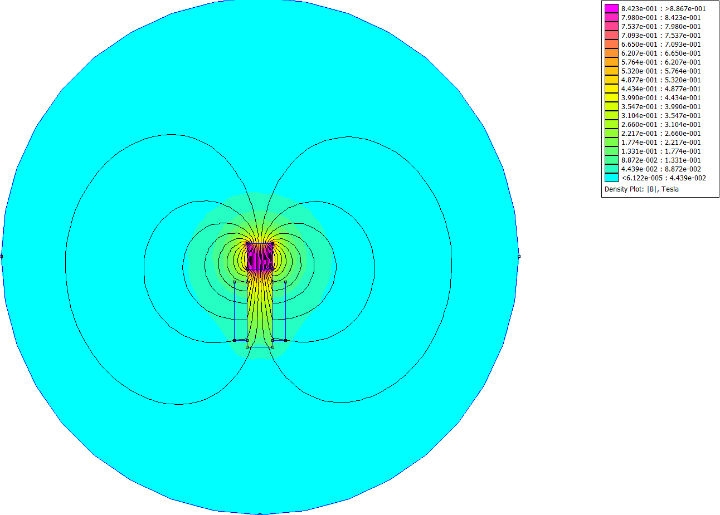
When the coil is energized, however, an opposing magnetic field is generated, and when properly scaled cancels out the permanent magnet's magnetic field at the tip of the core. For the purposes of this simulation, a current of 1A is applied through 100 turns of 26AWG wire.
Both of those field renderings were generated using FEMM. This results in a normally on magnetic latch, which can be switched off by energizing the coil. This was the solution ultimately chosen for the submarine's release mechanism. It could be fully sealed in epoxy, has no moving parts, and consumes no power when idle. Assembly is much more straightforward than a Halbach Array, which is constantly trying to force itself apart. The animation below shows how the system would operate.
These simple solutions can be used to solve a wide variety of problems, and are a good implement to have in your medical device engineering toolbox.
Motors and other electromagnets are capable of moving very accurately and with great force; however, they generally come with the penalty of high power consumption. As we push for smaller, lower power medical devices, permanent magnets can provide good low-power holding solutions. With recent advances, there is a strong push to incorporate more robotics into the medical device field.
Here I will be discussing two solutions which I worked with as part of a team building autonomous submersibles for the AUVSI RoboSub competition. One of the challenges involves dropping a metal ball into a box.
Sealing things so they function reliably underwater is a challenge when operating on a budget, and in the quest to minimize dynamic mechanical seals several different options were considered. Mechanical solutions such as a geneva drive based release mechanism only required a single seal, however two purely electromagnetic solutions made the final round.
The Halbach Array
The Halbach array is an arrangement of permanent magnets such that the field is only present on one side of the array. The Halbach Array came out ahead early on as repeatable and easy to build. The magnetic array would be connected to the end of a servo, and be fully encased in a plastic housing along with the motor and control hardware. To release the ball, the array would be rotated to direct the magnetic field away from the ball, which would then drop out of the robot into the target box. In prototype testing this arrangement worked fairly reliably. The rendering below shows roughly the setup we were going for.
It was cheap, relatively easy to build, and could be actuated with off-the-shelf low power hobby servos and a very simple interface to the main computer. The solution is completely sealed—requiring no dynamic watertight seals in order to function.
This image shows how the array functions. Magnetic flux, which would normally come out the back side of the array, instead travels laterally to a magnet that directs the field back out the front face of the array. This image was generated using Finite Element Method Magnetics (FEMM), an open source magnetics package.
The resulting field on the front side of the array is much stronger than the field on the other side of the array. It's also possible to create a functional array using just 3 magnets.
Several arrays can be combined to create magnetic couplings for transmitting rotation through sealed surfaces. There are drawbacks to this approach. Due to their orientations, the magnets are constantly repelling each other, making both construction and guaranteeing that the assembly stays together challenging. Size can also be a consideration. When designing thrusters for the submersible I considered a magnetic coupling to avoid having to seal the propeller shaft, however such a coupling was far too large for our application.
If you can manage those challenges, the Halbach Array can provide an extremely strong holding force for gripping tools or other load bearing needs.
The Normally On Magnetic Latch
The Halbach Array eliminated mechanical seals, but still required moving parts. The normally on magnetic latch ultimately came out as the best option due to it being completely solid state. A permanent magnet of low coercivity (such as the Neodymium cube magnet shown at the top of this blog) is placed on top of a ferromagnetic material, which in this case was low carbon steel. A coil of magnet wire is then wrapped around the steel core, creating a solenoid.
A normally on magnetic latch.
The above rendering has far fewer than the required number of wraps, and is just for illustration purposes. In general, it is more desirable to use more turns, which requires more voltage, but less current. The image below shows the magnetic field lines in the off condition, where the permanent magnet's field is carried through the high susceptibility steel. The coil has no current flowing through it.
When the coil is energized, however, an opposing magnetic field is generated, and when properly scaled cancels out the permanent magnet's magnetic field at the tip of the core. For the purposes of this simulation, a current of 1A is applied through 100 turns of 26AWG wire.
Both of those field renderings were generated using FEMM. This results in a normally on magnetic latch, which can be switched off by energizing the coil. This was the solution ultimately chosen for the submarine's release mechanism. It could be fully sealed in epoxy, has no moving parts, and consumes no power when idle. Assembly is much more straightforward than a Halbach Array, which is constantly trying to force itself apart. The animation below shows how the system would operate.
These simple solutions can be used to solve a wide variety of problems, and are a good implement to have in your medical device engineering toolbox.